Resultados y conclusiones de las pruebas
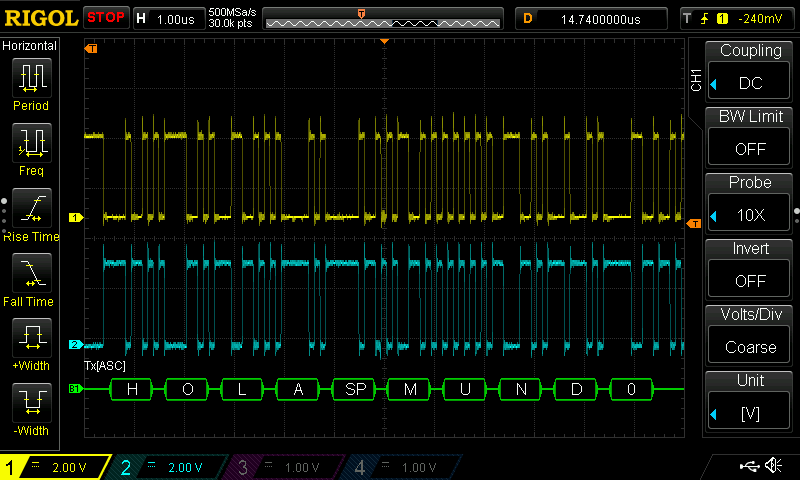
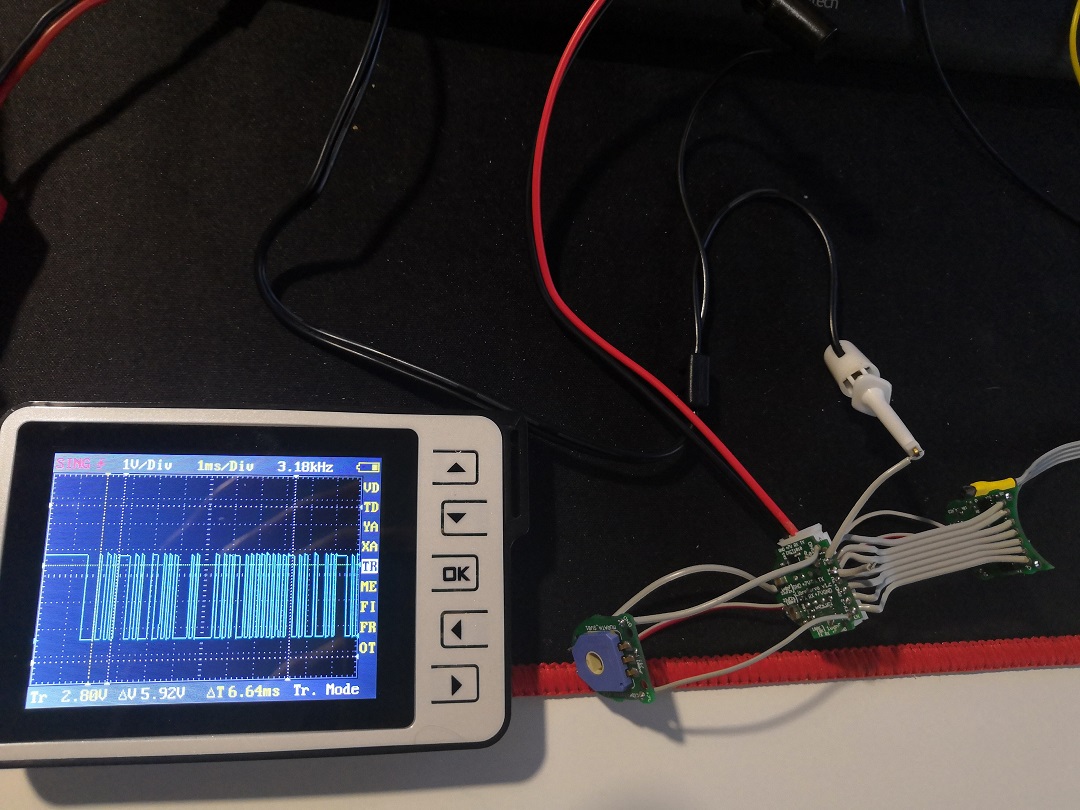
RS485 Hola mundo a 9 Mbps
Tras analizar todas las partes de LibreServo, he decidido realizar de nuevo varios cambios de diseño. Estoy contento con los resultados obtenidos con la placa de test ya que sin ella hubiera sido imposible analizar todos los componentes por separado y detectar todos los errores y fallos que he encontrado, es algo que tendría que haber hecho desde un primer momento y que me hubiera ahorrado muchísimo tiempo. Los temas a tratar son:
- Sensor de Corriente
- Protección ante cambio de polaridad de alimentación
- Nueva alimentación, mpm3610
- Sensor de temperatura NTC
- Nuevo led RGB más compacto
- Comunicación serie RS-232 vs RS-485
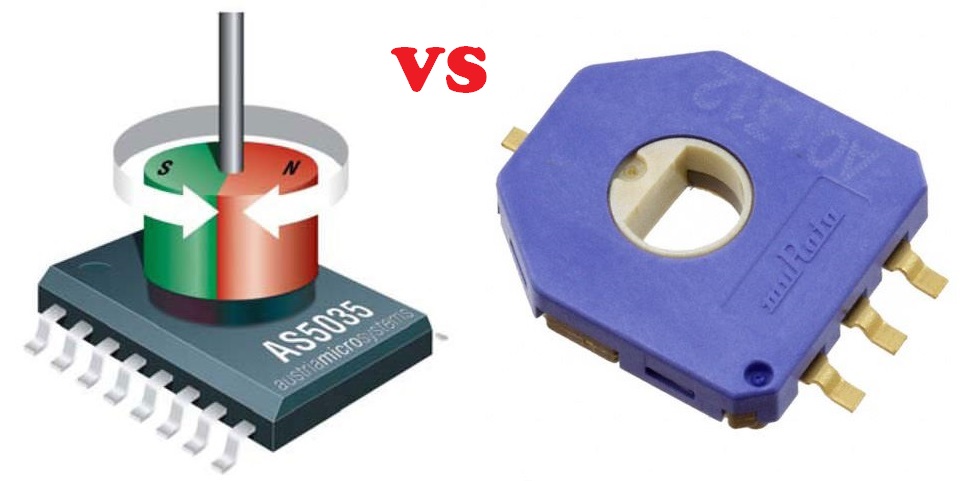
- Nuevo sensor magnético AEAT-8800
- Puente en H
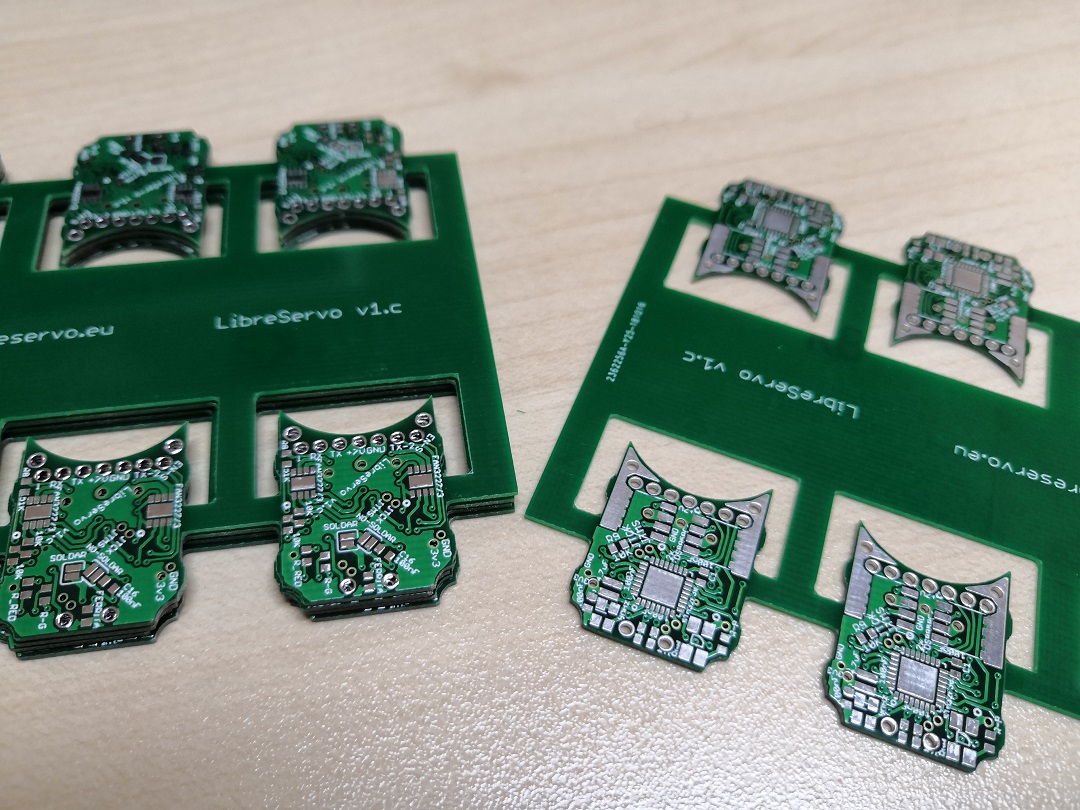
- Próxima PCB (4 capas)
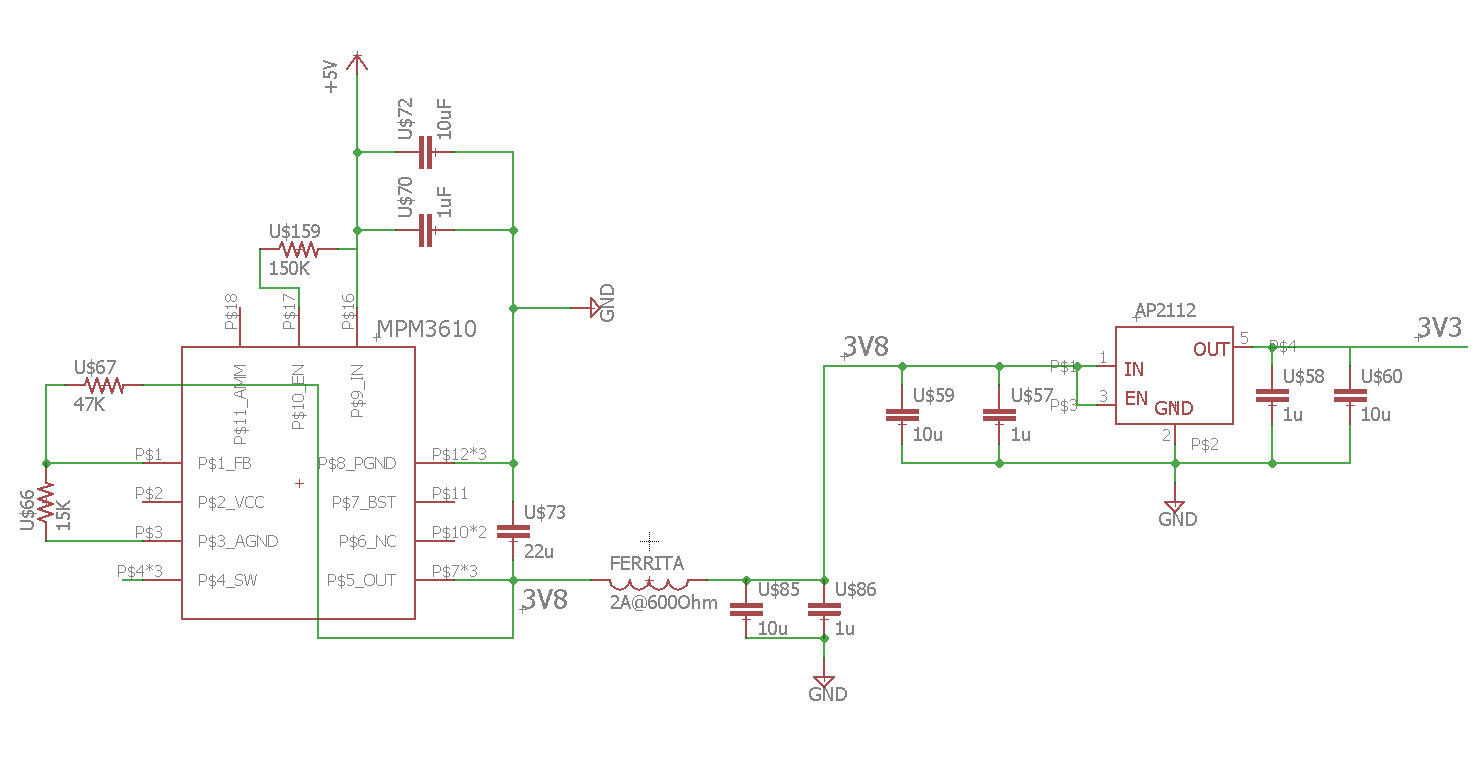 Circuito MPM3610 y AP2112
Circuito MPM3610 y AP2112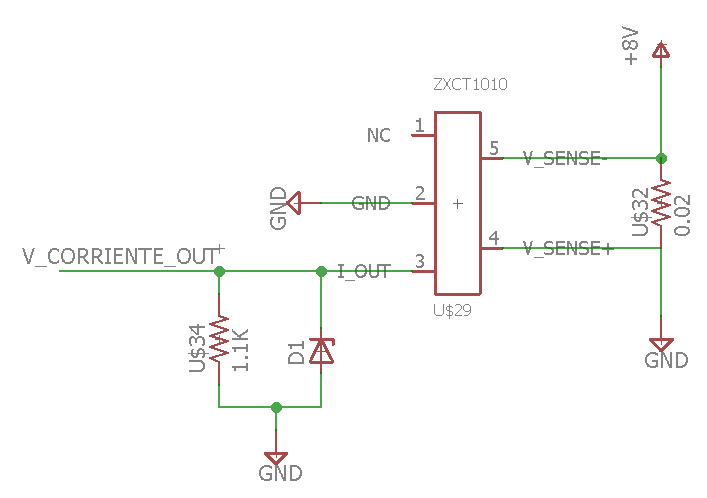 Circuito básico ZXCT1010 con protección Zener
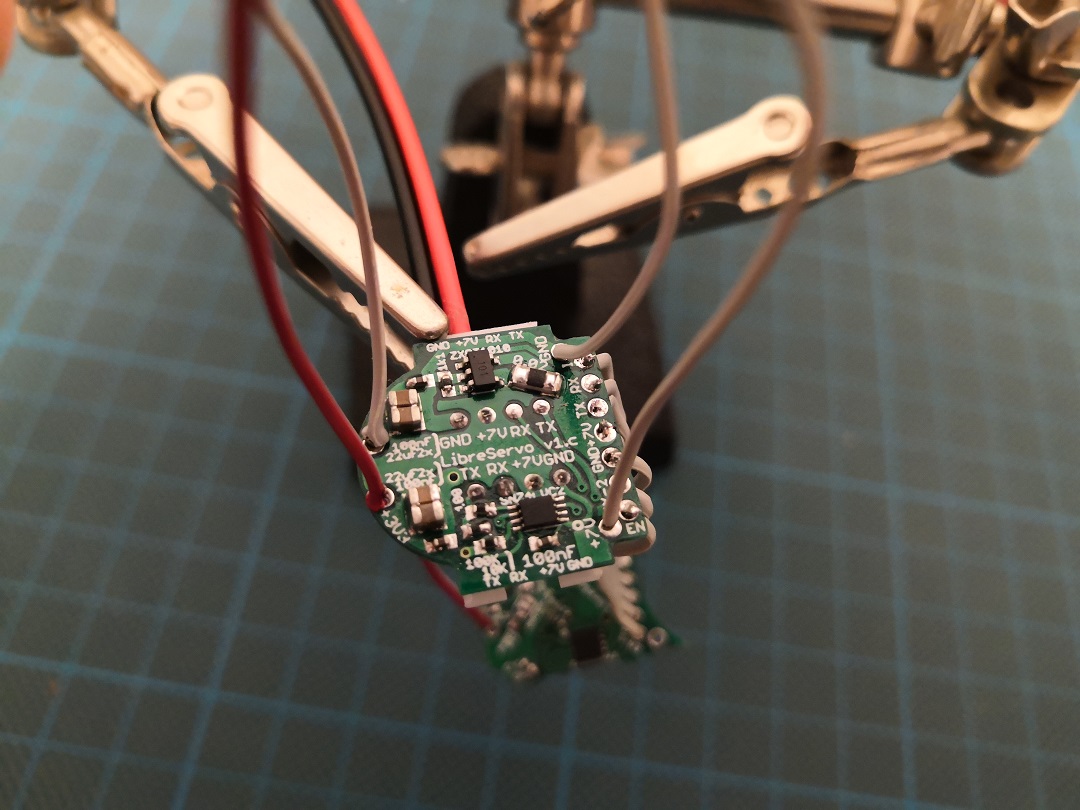
Circuito básico ZXCT1010 con protección Zener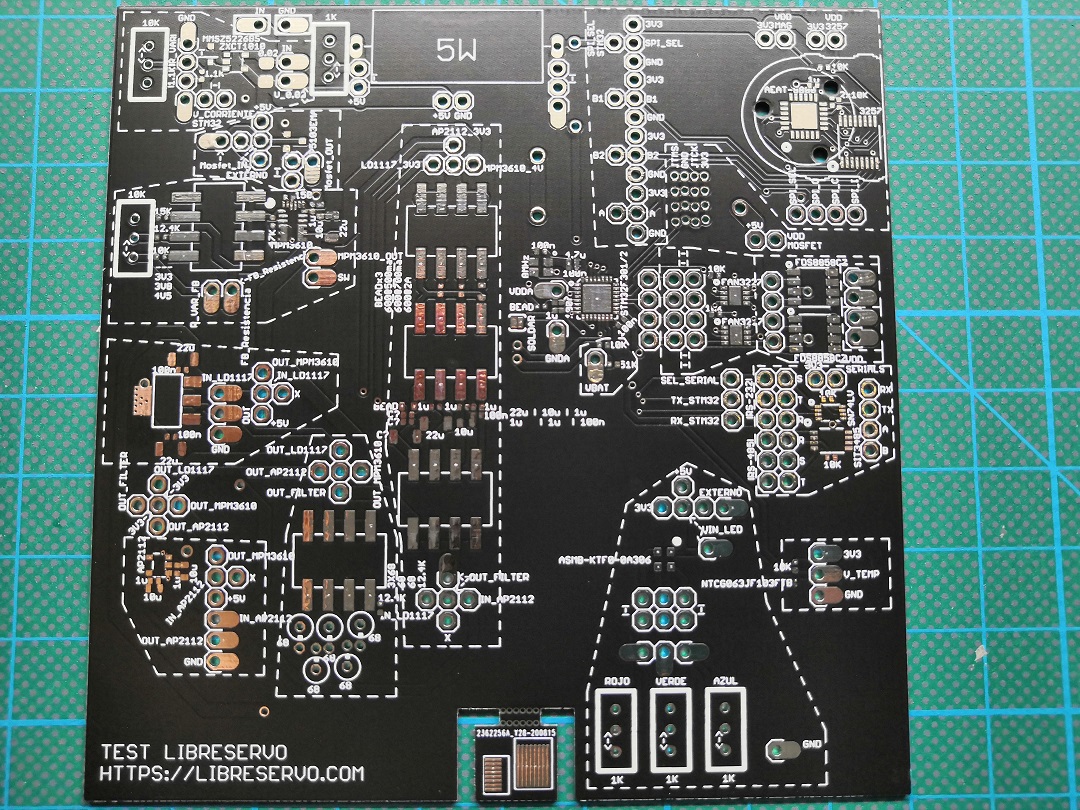 Placa para Tests de LibreServo
Placa para Tests de LibreServo
 Nuevo material y herramientas para LibreServo
Nuevo material y herramientas para LibreServo