No es objetivo de esta entrada explicar las decisiones de "routing" que se han llevado a cabo, eso sí, apuntar que todo el routado lo he realizado a mano. Comentaré sólo ciertos aspectos generales.
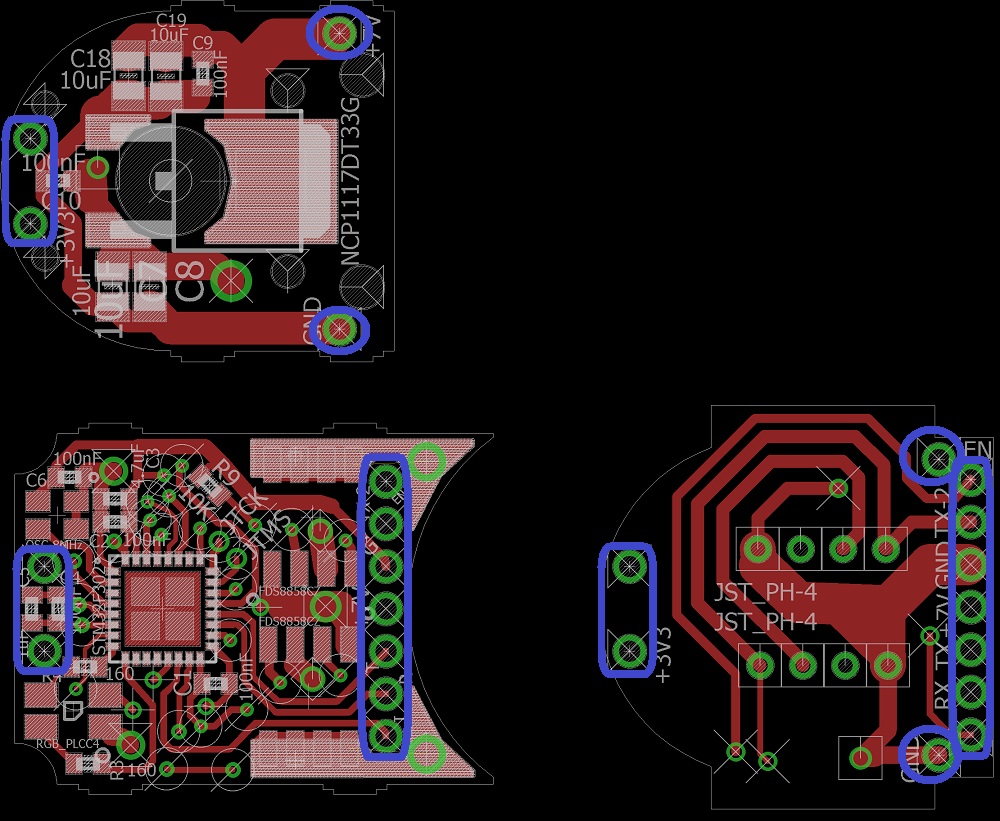
Debido al estrechísimo espacio que dispongo, me veo obligado a usar 3 placas separadas interconectadas por un "bus" de siete pines formado por una tira de pines con paso de 2mm, y por otros dos pines. Además, el potenciómetro es tan "grande", que a dicho nivel sólo se subirán los pines necesarios.
Buses en LibreServo
El ancho de los servomotores estándar, realmente no es estándar y varía algún que otro milímetro de un modelo a otro, es por ello que se han diseñado unos "apéndices" en las placas para que a la hora de instalar las placas se puedan lijar y ajustar al tamaño final deseado.
Detalle para ajuste del ancho

En la placa superior, la que tiene el potenciómetro, se han diseñado cuatro agujeros que servirán para centrar LibreServo con el eje del servomotor mediante una pieza 3D, la cual imitará el contorno del potenciómetro que traen los servomotores y fijará/sujetará en posición LibreServo.
Detalle para centrado

Se han tenido que diseñar varios pads específicos. Los más notorios son los que acompañan al regulador lineal, el cual ha tenido que ceder espacio para dejar hueco al eje del potenciómetro. Y el de la salida de los mosfet. En este caso, el diseño está muy al límite y es posible que obligue a soldar los cables del motor directamente en los pads de los mosfet. Desde luego no la solución más limpia.
Detalle de pads

A continuación dejo la galería de fotos del PCB. ¡en pocos días enviaré a fabricar el primer lote!
Galería de fotos del PCB



