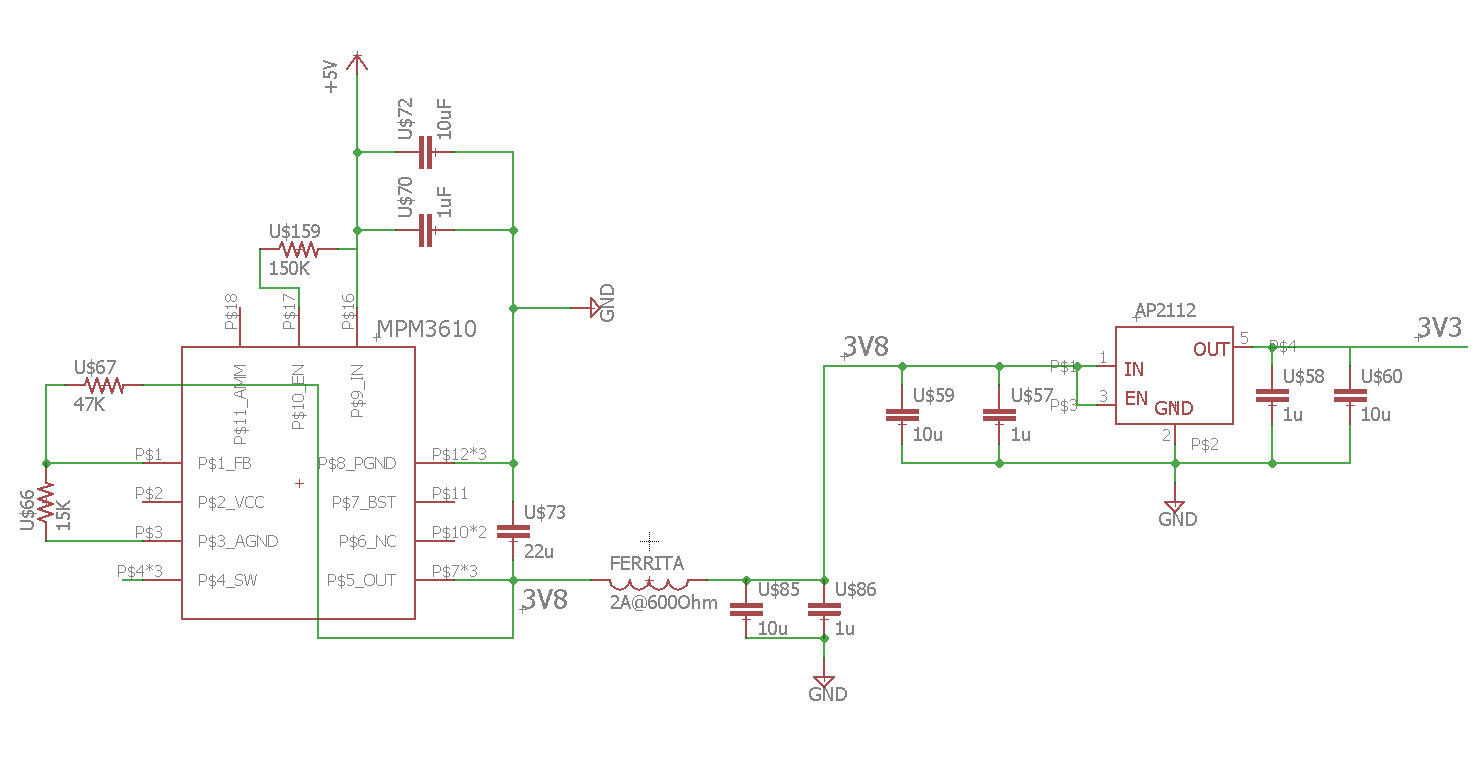
 Circuito MPM3610 y AP2112
Circuito MPM3610 y AP2112
Una de las partes que más he cambiado y pensado en las versiones de LibreServo es la alimentación. En versiones anteriores fue un regulador lineal que reduje de tamaño, pero la verdad es que no estaba para nada agusto ya que si LibreServo era alimentado con tan sólo 12V, el regulador lineal debería de disipara hasta 1,74 Watios y en 16v 2,54 Watios... algo que era realmente irreal que pudiera hacerlo.
Hace unos meses descubrí el MPM3610, y esto hizo que por fin pudiera diseñar la alimentación como quería. Este diminuto componente es un más que potente step-down de 1,2A que admite hasta 21V de entrada y que ¡además tiene la bobina y el diodo incorporado! Es esto último lo que lo hace perfecto para mi diseño, por el reducido espacio utilizado, siendo el único step-down que se fabrica que tenga integrado bobina y diodo en el mismo encapsulado. La diferencia entre usar un step-down y un regulador linel es que un regulador lineal de 3,3V a 12V da una eficiencia de un 35%, mientras que el step-down del 80% o superior, el resto se disipa en calor, con lo que uno es mucho más propenso a sobrecalentarse que el otro. Lo malo de usar un step-down es que son bastante ruidosos y su salida no es tan limpia como la de un regulador lineal.
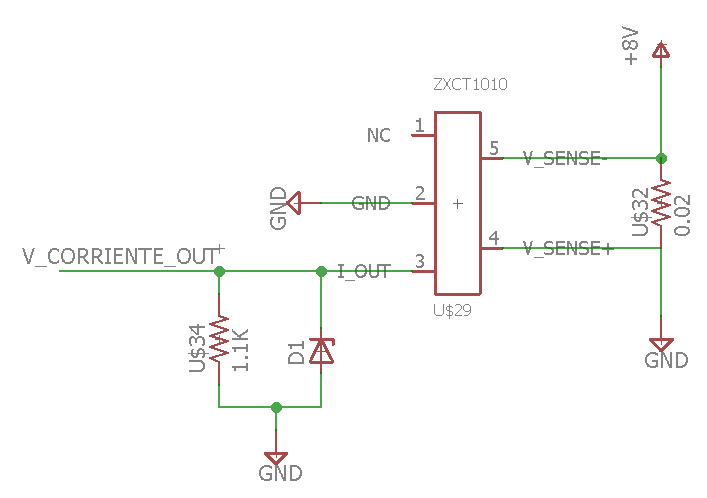 Circuito básico ZXCT1010 con protección Zener
Circuito básico ZXCT1010 con protección Zener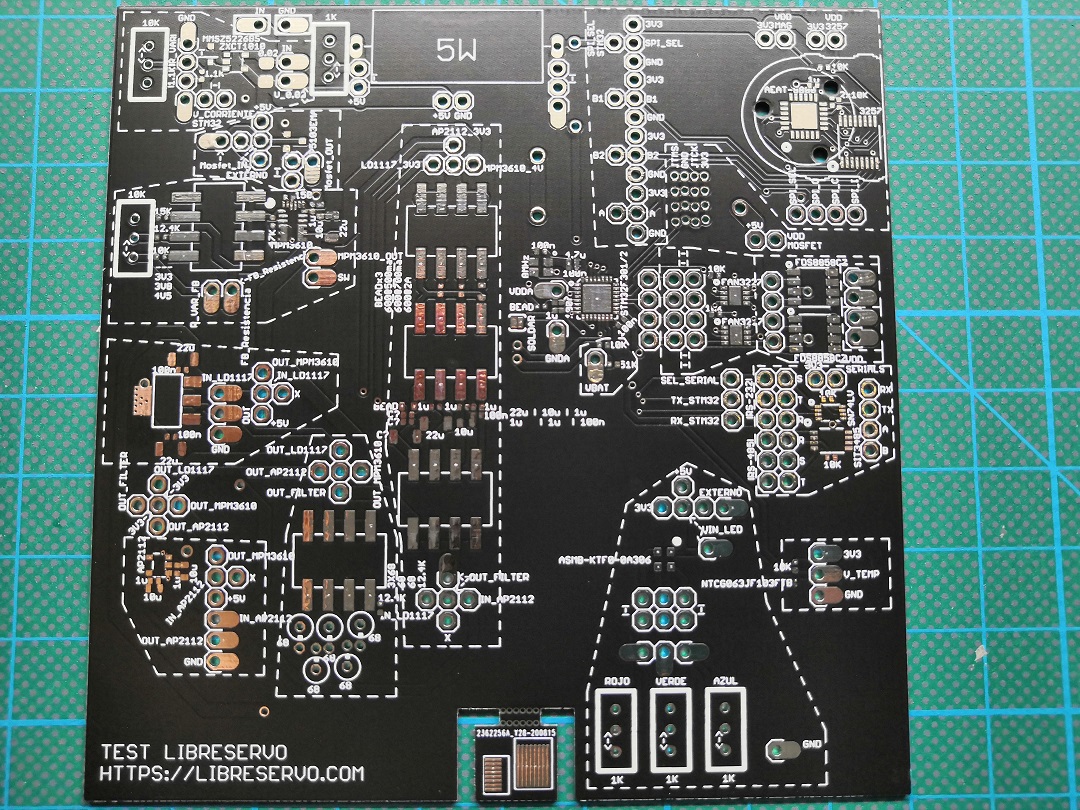 Placa para Tests de LibreServo
Placa para Tests de LibreServo
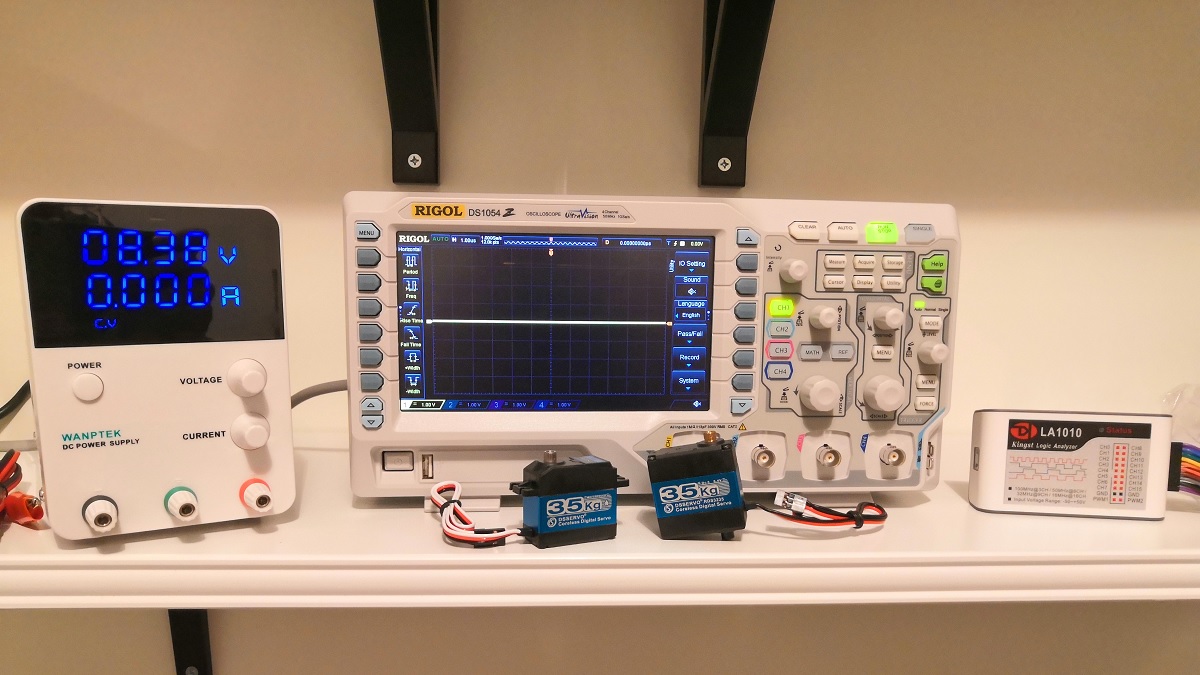 Nuevo material y herramientas para LibreServo
Nuevo material y herramientas para LibreServo