Como ya mencioné en Un poco de historia sobre mi, en mi primer bípedo me encontré varios obstáculos, el precio de los servomotores y la calidad de los mismos fueron de los mayores condicionantes. Para mi segundo bípedo (ya tenía un trabajo), decidí echar la casa por la ventana y no mirar el precio de los servomotores. Quería unos potentes, de buena calidad y que el paso del tiempo y el uso no los dañara. Acabé comprando unos Hitec 5990TG, servomotores de 30Kg/cm de fuerza y engranajes de titanio. Los conseguí a muy buen precio, con un cambio euro-dólar extraordinariamente favorable. Aún así, el precio del bípedo se me había triplicado y tras su uso detecté un nuevo problema, eran potentes y de calidad claramente superior a los que tenía antes, pero seguían siendo "tontos". Finalmente y por diferentes razones (entre otras el precio desorbitado que suponía construir un bípedo a mano), dejé de construir bípedos y me volqué con los coches (siguelíneas, rastreadores...).
DY-BOT v2
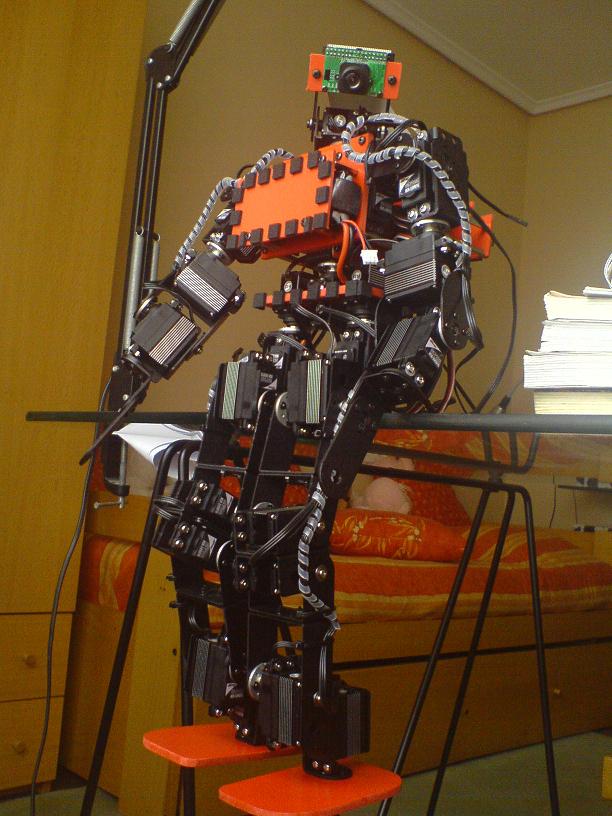
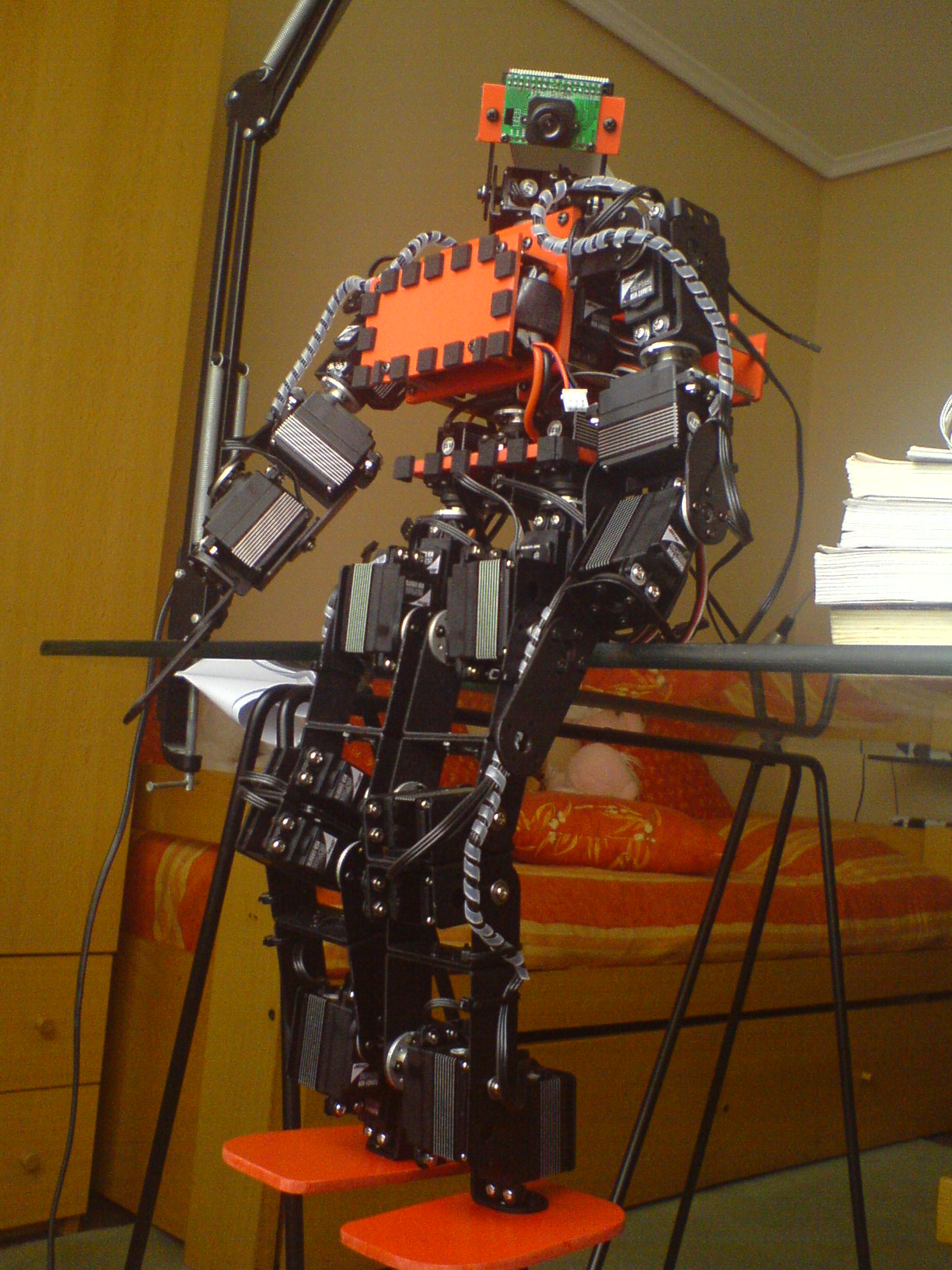
Han pasado casi 6 años, he seguido ligado a la robótica todos estos años pero siempre me quedó una espina clavada, nunca llegué a sacar todo el potencial que mecánicamente tenían los carísimos 5990TG. A día de hoy además, las impresoras 3D se han popularizado, así que también se abre un montón de puertas a diseños propios, baratos, ligeros y de fácil implementación. Con la idea de recuperar esos 5990TG se me ocurrió algo mejor... ¿Por qué no modificarlos y hacer que en vez de servos tontos de mecánica excelente sean servos listos con mecánica excelente? Y, ya que estamos... ¿Por qué no hacerlo de tal manera que sean compatibles con futuros servos que me compre? La verdad es que china ya no es lo que era hace tan sólo 7-8 años y ahora si realmente sabes buscar, es posible encontrar hardware de buena calidad a precio más que asumible.
Dicho y hecho, ¡Ya tengo un nuevo proyecto en mente!
Hitec 5990TG
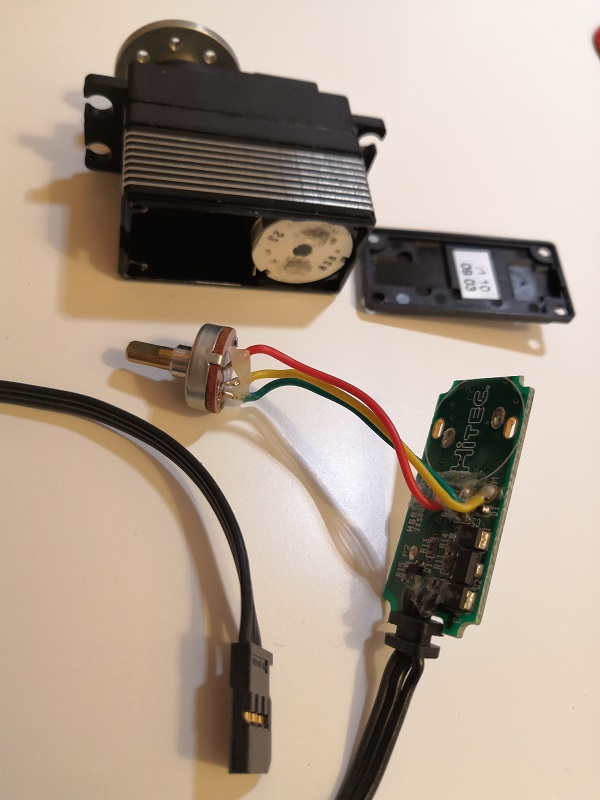
La idea es hacer la electrónica del servomotor para convertirlo en un "smartServo". Además, intentaré que sea lo más estándar posible en tamaño y forma, para que se pueda adaptar no sólo a mis hitec, sino a posibles servos potentes y baratos de hoy en día para obtener un servo de precio (servo + electrónica) menor a 45-50€ pero características de servo de más de 150-200€.
Características:
Viendo todas las características de los smartServos de hoy en día, se pretende conseguir características superiores a las de éstos siempre que sea posible:
- El servomotor podrá girar 360 grados.
- Se podrán encadenar los servomotores. No hará falta conectar todos los servomotores a la placa controladora.
- La resolución del servomotor será de
12bits como poco (4096 pasos)16 bits (65536 pasos) - El rango de voltaje irá de tan sólo 4,5V hasta los 18V.
- La comunicación del servomotor podrá seguir siendo PWM para mantener la compatibilidad, pero para obtener todas las características, sería serie de hasta 9Mbps
full duplexRS-485 half-duplex (configurable a diferentes velocidades) intentando en todo momento que no se necesite ningún tipo de hardware externo (un MAX485), siendo posible controlarlos directamente desde el pc (con un adaptadorUSB-SerieUSB-RS485), con una arduino a 5V o con cualquier controlador a 3,3V. - El propio servomotor será el encargado de generar las curvas de movimiento (por ejemplo senoidales o las potentes curvas hermíticas [dado punto inicial y final, así como las pendientes en dichos puntos, calcula la curva]).
- Capacidad de encadenar comandos de movimiento que el servo guardará e irá siguiendo de manera ordenada.
- Capacidad de leer la tensión, corriente consumida (instantánea, total y la media), posición y temperatura del servomotor.
- Capacidad de generar un log de posición, voltaje, corriente y/o temperatura para ser analizado a posteriori.
- Capacidad de poder alterar las constantes de control del servomotor.
- Capacidad de mandar el mismo comando a varios servomotores a la vez, a todos ellos o a rangos de ellos sin tener que enviar varias veces el comando, sólo una vez.
- Control del par motor mediante la lectura de la corriente.
- LED rgb (estamos en 2018, si algo no es rgb ya no vale para nada 😉 ).
¡Manos a la obra!