We have a winner. Test results in PCB test 2
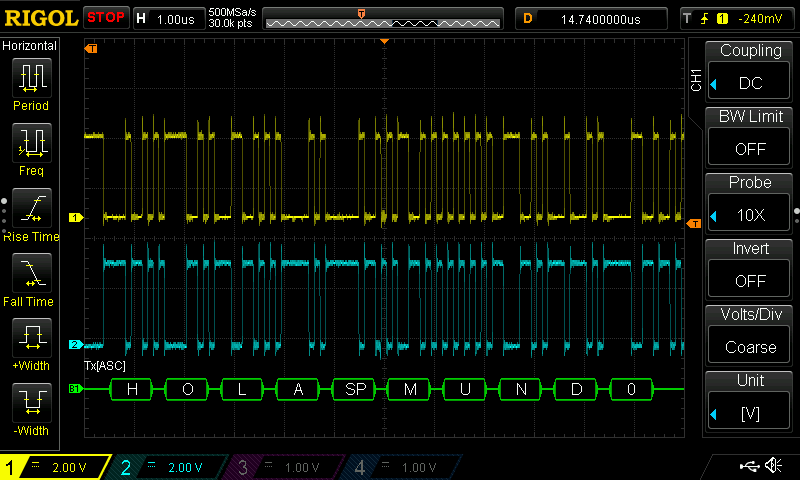
LibreServo sending data via RS485 to Arduino plotter
After several tests, the LibreServo hardware is finally chosen and it's working, even the H-bridge that gave me a lot of problems! In general, all the parts of LibreServo remain as they were, because they were already working correctly, except the parts are discussed in this article.
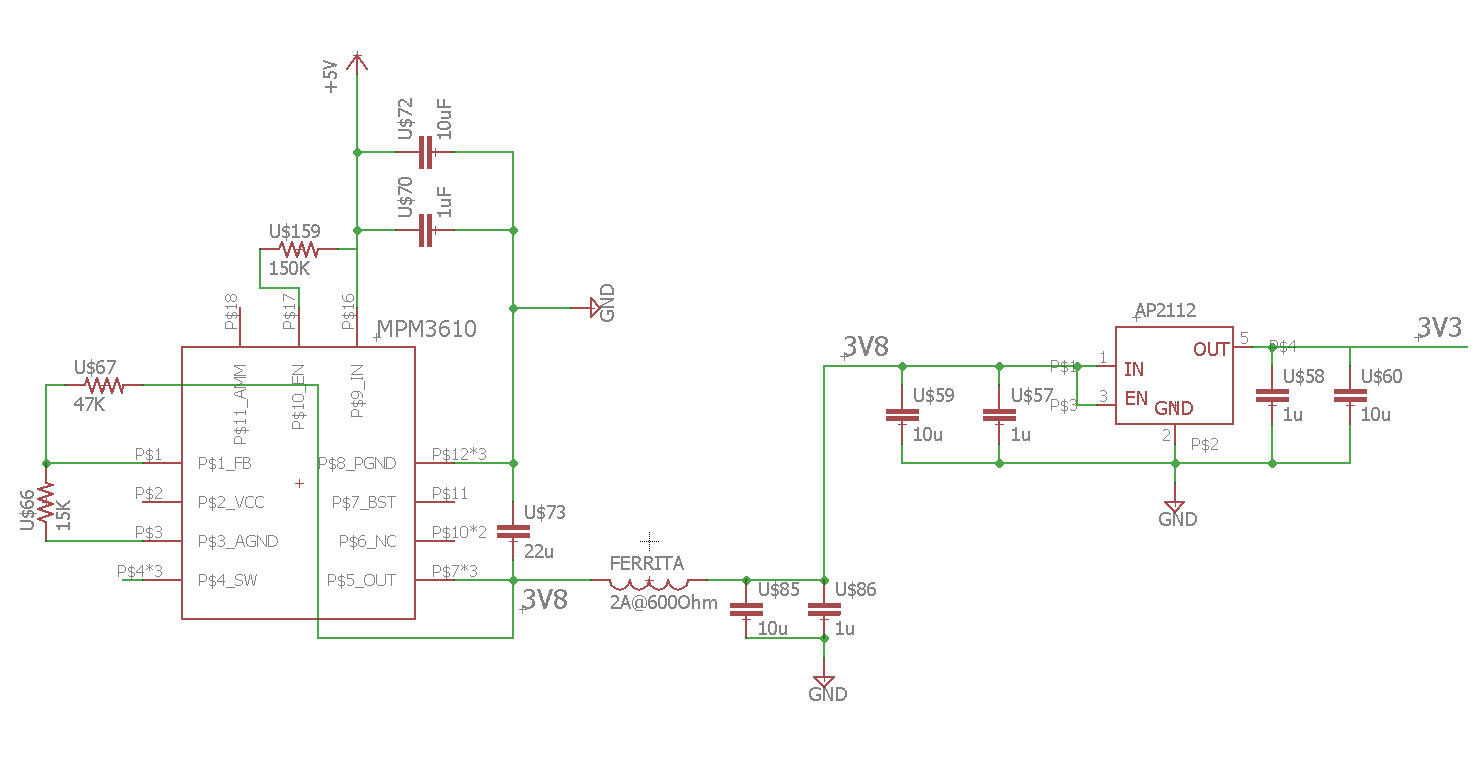 MPM3610 and AP2112 circuit
MPM3610 and AP2112 circuit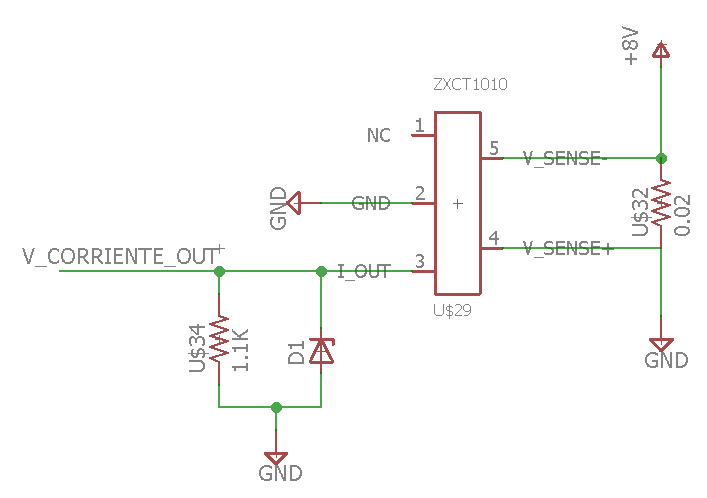 Circuito básico ZXCT1010 con protección Zener
Circuito básico ZXCT1010 con protección Zener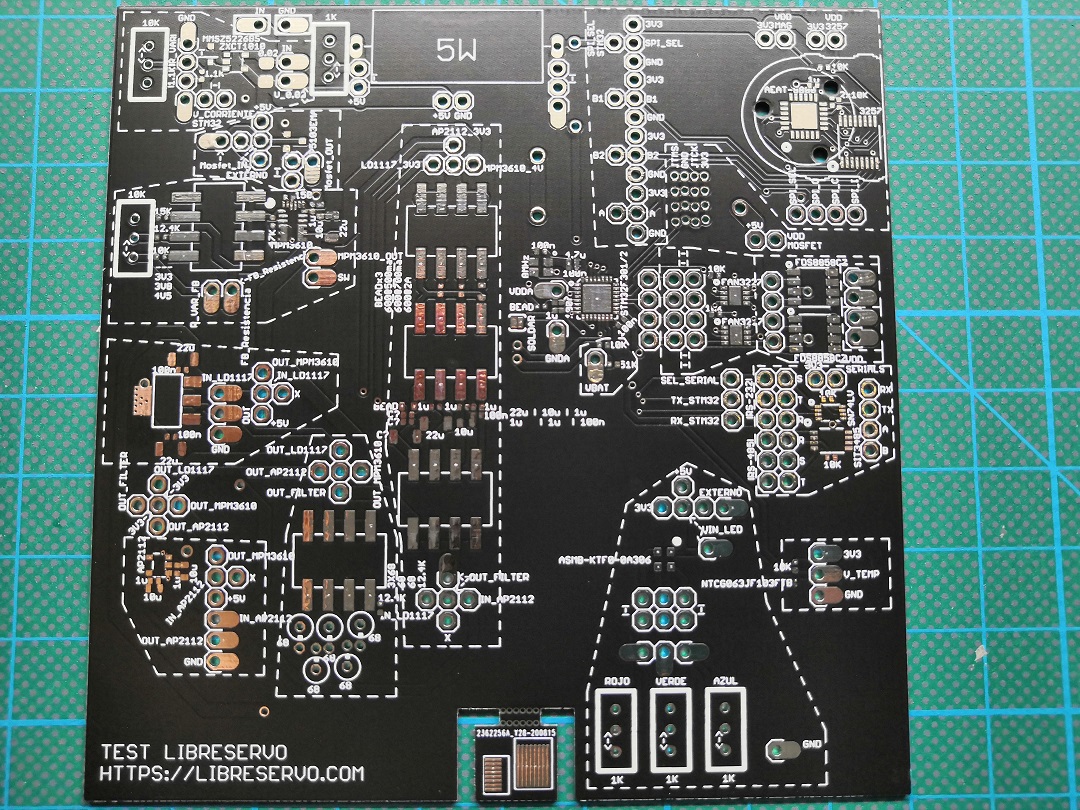 LibreServo test PCB
LibreServo test PCB
 Nuevo material y herramientas para LibreServo
Nuevo material y herramientas para LibreServo
 LibreServo changes to
LibreServo changes to 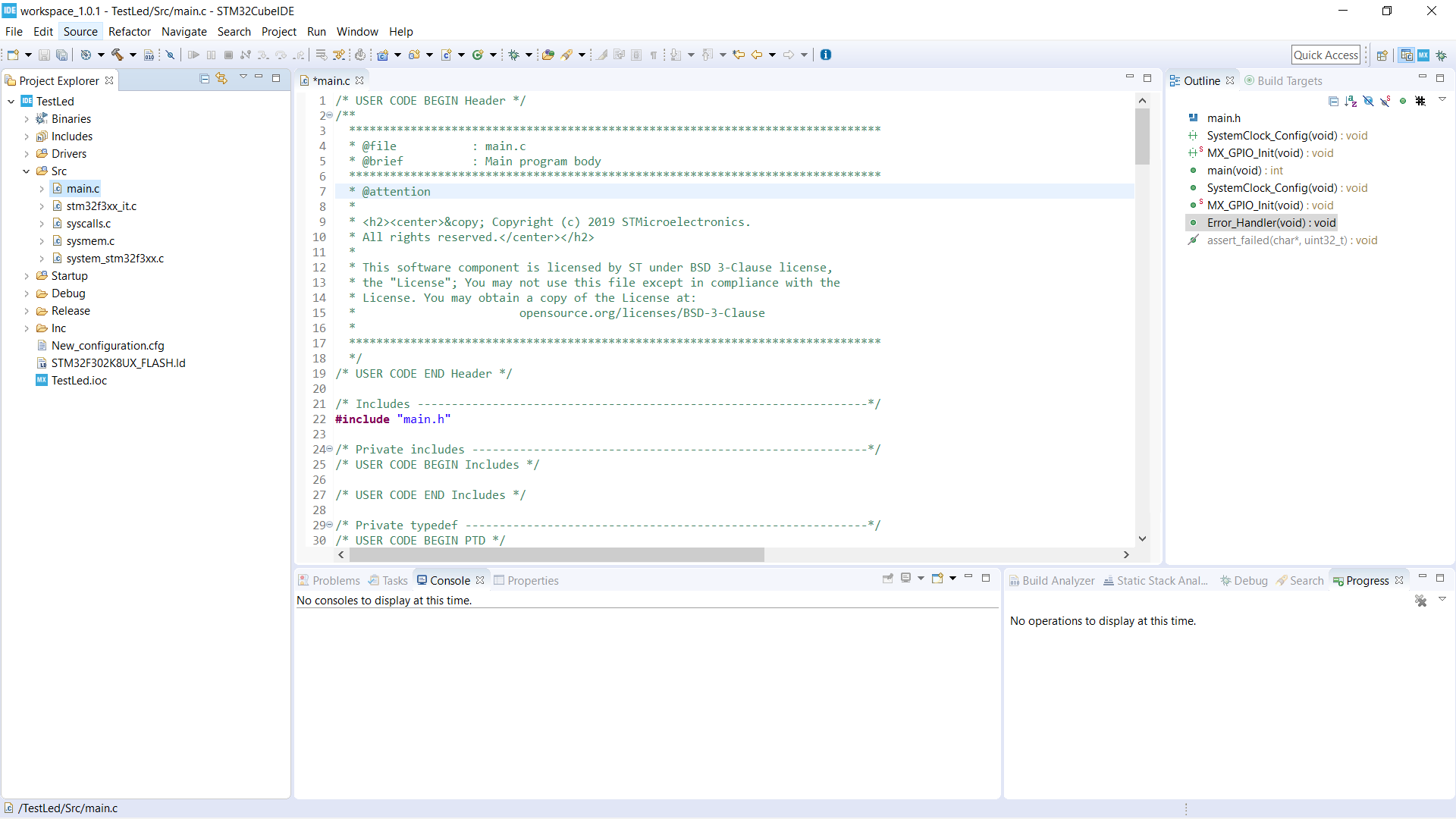 Código base recién creado
Código base recién creado