After more than a year without any update in LibreServo, it might seem that the project is at a standstill and/or abandoned. As I have said more than once, and I repeat myself, I will never leave LibreServo until it is completely finished, even if it takes me 5 more years.
What has happened in the last year?
Although nothing has been updated on the website, quite a few things have happened behind the web. The main one and the one that has taken me almost 8 months was that I was contacted by a company that makes 3D housing, they wanted to develop the electronics for a new construction arm and they were a bit desperate because they couldn't find anyone who knew how to program what they required. Coincidentally, the encoder they were using was from the same family as LibreServo, so Google worked its magic and found me.
In short, a project that was supposed to take 1-2 months to complete turned out to take 7-8 😅 but finally came to fruition (this very month that I am writing this article). For LibreServo it was not wasted time, because several concepts have been validated and proven in real life to work.
On the other hand, before the house printing project I was making very deep changes in the programming of LibreServo. With the current version that is on Github, LibreServo exceeds 95% ROM utilisation, in other words, there is almost no room for improvement and/or possibility to introduce new features. With that in mind I set about reprogramming LibreServo... as of today the ROM utilisation is below 75%, an overwhelming improvement. Most of the improvement comes from the reprogramming of the treatment of the serial port communication, the reception of commands and their processing, only in that section I reduced in more than 2000 lines of code. In addition, I took the opportunity to comment all the code, a really hard work to raise the quality standard to a more acceptable level. I still have to finish commenting the code and test that the new code works correctly, it's practically like a new LibreServo. I will update Github as soon as it is finished and tested.
As if that wasn't enough, I've started a new project using the LibreServo standard, in particular I'm making a double motor driver, it's like two LibreServos but joined together and designed to drive DC motors, in particular I want it for a line follower that I would like to make again. I call the project LibreDriver (very original name, I know 😜). In addition, the project was done directly in Kicad, so I'm finally starting to move away from Eagle.
LibreDriver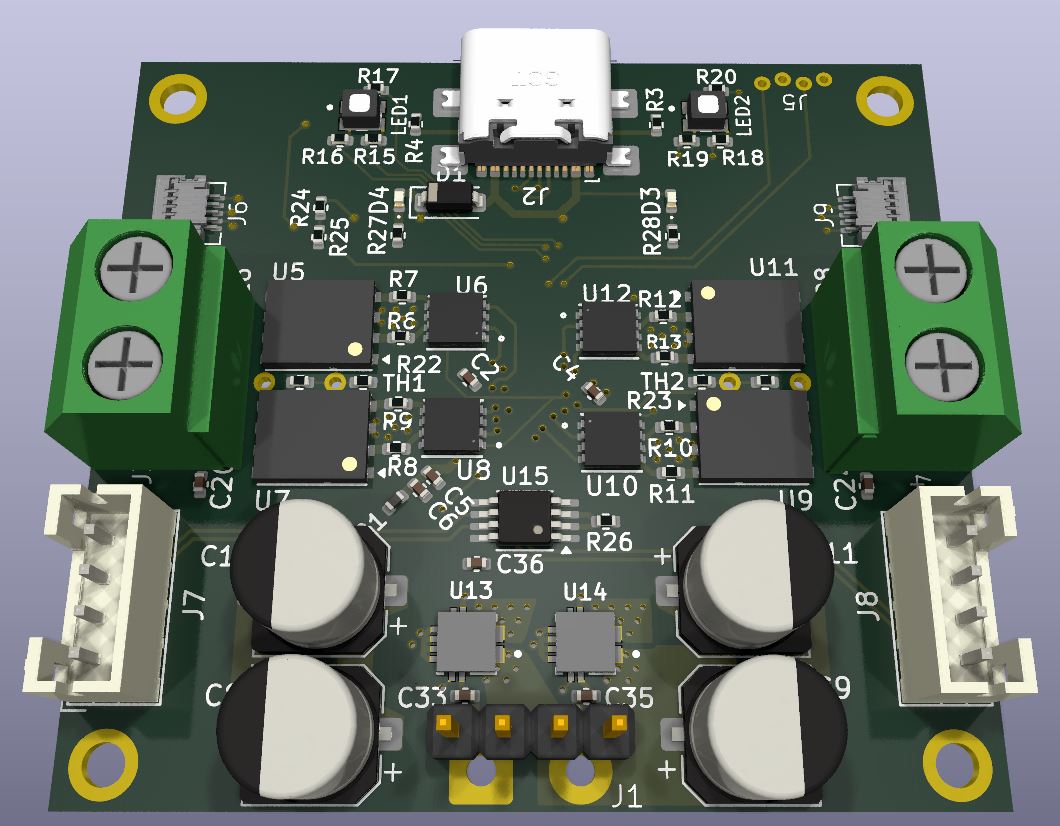
Finally, I have to migrate the website to a higher version of Drupal due to some incompatibilities... so after more than 5 years using a Raspberry 3 as a server, I will move to a mini-pc N100, where the website will be a virtual machine, which will make it much easier to manage, backup and recover in case of disaster.
I hope to bring news sooner rather than later, august doesn't count... 😇