EDITADO: 20/01/2023
Se añade la función FD en LibreServo v2.1.
He dedicado mucho tiempo a la parte de comandos en LibreServo y creo que es una de las partes más importantes del proyecto, es cómo se presenta LibreServo ante el usuario. Ofrece una flexibilidad y posibilidades que yo nunca he visto en ningún fabricante.
La documentación de los comandos la dividiré en dos artículos, este artículo está más centrado en la descripción de los comandos y la segunda parte está centrada en ejemplos y explicación de ejecución en LibreServo.
Los comandos de LibreServo son los siguientes:
- Comandos de movimiento
- Movimiento lineal [M]
- Movimiento trapezoidal [MT]
- Movimiento trapezoidal 50% [Mt]
- Movimiento trapezoidal acelerado [MA]
- Movimiento Senoidal [MS]
- Movimiento Senoidal 50% [Ms]
- Movimiento Hermítico [MH]
- Movimiento Continuo [MC]
- Movimiento Continuo trapezoidal [MCT]
- Movimiento Continuo Senoidal [MCS]
- Movimiento Contínuo Hermítico [MCH]
- Movimiento PWM [MP]
- Motor Libre [MF]
- Espera Motor [MW]
- Encuentra Dirección [FD]
- Comandos de luz y sonido
- Comandos de lectura de variables
Comandos de movimiento
Son comandos específicos para el movimiento y control del servomotor. Los diferentes movimientos y sus curvas se explican más detenidamente el el artículo sobre curvas de movimiento.
Movimiento lineal [M]
- S12M12000[:1000]
La anotación que vemos de 12000[:1000] indica que el comando M obliga a pasar un parámetro, pero el segundo parámetro es opcional. Además, nos indica que se utiliza el carácter ':' para separar los parámetros. Esta anotación se utiliza para el resto de comandos.
Volviendo al comando, el comando M es un comando en el que el servomotor se mueve a velocidad constante hasta la posición final.
param2 (opcional): el segundo parámetro indica en milisegundos, ms, el tiempo en el que deberá de completar el movimiento, si no se indica tiempo alguno LibreServo intentará llegar lo antes posible. Rango: 0, +2.147.483.647
Ejemplo:
| S12M12000:1000; | El Servomotor 12 deberá moverse a la posición 12000 en 1000 ms (1 segundo). |
|---|
Movimiento trapezoidal [MT]
- S12MT12000[:150]:1000;
El comando MT es un movimiento de aceleración y desaceleración constante calculada en base a una duración de la aceleración fijada.
param2 (opcional): tiempo de aceleración y desaceleración en ms. Si no se especifica, se coge el valor por defecto guardado en flash (t_ramp_t). Si el tiempo de aceleración y desaceleración es mayor que el tiempo total de movimiento, se reducen para que entren en el tiempo total de movimiento. Rango: 0, +2.147.483.647
param3: tiempo total de movimiento. Rango: 0, +2.147.483.647
Ejemplo:
| S12MT-8000:1000; | El servomotor 12 deberá moverse a la posición -8000 en 1000ms. El tiempo de rampa será el que esté en t_ramp_t |
|---|---|
| S12MT-8000:150:1000; | El servomotor 12 deberá moverse a la posición -8000 en 1000ms. El tiempo de rampa será de 150ms |
Movimiento trapezoidal 50% [Mt]
- S12Mt12000:1000;
Es igual que MT, pero el tiempo de aceleración será la mitad del tiempo total de movimiento y el tiempo de desaceleración la otra mitad.
param2: tiempo total de movimiento. Rango: 0, +2.147.483.647
Ejemplo:
| S12MT-8000:1000; | El servomotor 12 deberá moverse a la posición -8000 en 1000ms. El tiempo de rampa será de 500ms (500*2 = 1000) |
|---|
Movimiento trapezoidal acelerado [MA]
- S12MA12000[:150]:1000;
Es un movimiento trapezoidal, pero en el que en vez de indicar el tiempo de aceleración, se indica la aceleración que se quiere y LibreServo calcula el tiempo requerido de aceleración y desaceleración.
param2 (opcional): Aceleración y desaceleración de la rampa. Si no se especifica, se coge el valor por defecto guardado en flash (a_ramp_t). Si con la aceleración indicada no se llega al destino, se hará un movimiento lineal. Rango: 0, +2.147.483.647
param3: tiempo total de movimiento. Rango: 0, +2.147.483.647
Ejemplo:
| S12MA-8000:1000; | El servomotor 12 deberá moverse a la posición -8000 en 1000ms. La aceleración de la rampa será el que esté en a_ramp_t |
|---|---|
| S12MA11000:125:1000; | El servomotor 12 deberá moverse a la posición -8000 en 1000ms. La aceleración de la rampa será de 125 |
Movimiento Senoidal [MS]
- S12MS12000[:150]:1000;
El comando MS produce un movimiento con una aceleración y desaceleración variable en forma de seno, de ahí su nombre.
param2 (opcional): tiempo de aceleración y desaceleración en ms. Si no se especifica, se coge el valor por defecto guardado en flash (t_ramp_s). Si el tiempo de aceleración y desaceleración es mayor que el tiempo total de movimiento, se reducen para que entren en el tiempo total de movimiento. Rango: 0, +2.147.483.647
param3: tiempo total de movimiento. Rango: 0, +2.147.483.647
Ejemplo:
| S12MS50000:2000; | El servomotor 12 deberá moverse a la posición 50000 en 2000ms. El tiempo de rampa será el que esté en t_ramp_s |
|---|---|
| S5MS50000:150:2000; | El servomotor 5 deberá moverse a la posición 50000 en 2000ms. El tiempo de rampa será de 150ms |
Movimiento Senoidal 50% [Ms]
- S12Ms12000:1000;
Es igual que MS, pero el tiempo de aceleración será la mitad del tiempo total de movimiento y el tiempo de desaceleración la otra mitad.
param2: tiempo total de movimiento. Rango: 0, +2.147.483.647
Ejemplo:
| S8MT-8000:3000; | El servomotor 8 deberá moverse a la posición -8000 en 3000ms. El tiempo de rampa será de 1500ms (1500*2 = 3000) |
|---|
Movimiento Hermítico [MH]
- S12MH12000[:0][:8000][:0]:1000;
Por norma, todos los movimientos presuponen que el servomotor empieza un movimiento de parado y termina parado, pero en esta curva indicamos el punto inicial de movimiento, la velocidad inicial, el punto final y la velocidad final y LibreServo calcula toda la ruta. Es ideal para cuando queremos interrumpir un movimiento y que el servomotor parta ya de la velocidad en la que estaba, para hacer movimientos encadenados complejos... o para generar curvas diferentes a los movimientos anteriores.
param2 (opcional): velocidad inicial. Si no se especifica es el que tuviera al empezar el movimiento. Rango: -2.147.483.646, +2.147.483.647
param3: posición final. Rango: -2.147.483.646, +2.147.483.647
param4 (opicional): velocidad final. Si no se especifica, es cero. Rango: -2.147.483.646, +2.147.483.647
param5: tiempo total de movimiento. Rango: 0, +2.147.483.647
Ejemplo:
| S7MH12000:1000; | El servomotor 7 se moverá a la posición 12000 en 1000ms. La posición y velocidad inicial del movimiento será la que esté justo al empezar la curva. Además presupone que la velocidad final que queremos será cero |
|---|---|
| S15MH5000:12000:1500; | El servomotor 15 se moverá a la posición 12000 en 1500ms. La posición inicial es 5000, la velocidad inicial será la que esté justo al empezar la curva y la final se presupone que es cero |
| S3MH1300:0:-12000:-300:4000; | El servomotor 3 se moverá a la posición -12000 en 4000ms. La posición inicial es 1300 con una velocidad inicial de cero y final de -300 |
Movimiento Continuo [MC]
- S12MC65535[:1000]
Igual que el Movimiento Lineal, MC se comporta de la misma forma pero tiene en cuenta la velocidad del servomotor y no su posición.
param2 (opcional): el segundo parámetro indica en milisegundos, ms, el tiempo en el que deberá alcanzar la velocidad, si no se indica tiempo alguno LibreServo intentará llegar lo antes posible. Rango: 0, +2.147.483.647
Ejemplo:
| S9MC-131070:1000; | El Servomotor 9 deberá moverse -2 vueltas por segundo (65535*2 = 131070) en 1000 ms (1 segundo) |
|---|
Movimiento Continuo trapezoidal [MCT]
- S12MCT65535[:150]:1000;
param2 (opcional): tiempo de aceleración y desaceleración en ms. Si no se especifica, se coge el valor por defecto guardado en flash (t_ramp_t). Si el tiempo de aceleración y desaceleración es mayor que el tiempo total de movimiento, se reducen para que entren en el tiempo total de movimiento. Rango: 0, +2.147.483.647
param3: tiempo total de movimiento. Rango: 0, +2.147.483.647
Ejemplo:
| S5MCT-32767:1000; | El servomotor 5 deberá alcanzar la velocidad de menos media vuelta por segundo en 1000ms. El tiempo de rampa será el que esté en t_ramp_t |
|---|---|
| S4MCT-32767:150:1000; | El servomotor 4 deberá alcanzar la velocidad de menos media vuelta por segundo en 1000ms. El tiempo de rampa será de 150ms |
Movimiento Continuo Senoidal [MCS]
- S12MCS65535[:150]:1000;
param2 (opcional): tiempo de aceleración y desaceleración en ms. Si no se especifica, se coge el valor por defecto guardado en flash (t_ramp_s). Si el tiempo de aceleración y desaceleración es mayor que el tiempo total de movimiento, se reducen para que entren en el tiempo total de movimiento. Rango: 0, +2.147.483.647
param3: tiempo total de movimiento. Rango: 0, +2.147.483.647
Ejemplo:
| S6MCS65535:2000; | El servomotor 6 deberá alcanzar la velocidad de una vuelta por segundo en 2000ms. El tiempo de rampa será el que esté en t_ramp_s |
|---|---|
| S2MCS65535:150:2000; | El servomotor 2 deberá alcanzar la velocidad de una vuelta por segundo en 2000ms. El tiempo de rampa será de 150ms |
Movimiento Contínuo Hermítico [MCH]
- S12MCH12000[:0][:8000][:0]:1000;
En este comando pasamos la velocidad inicial y final del movimiento así como la aceleración inicial y final que queramos y LibreServo calcula toda la ruta. Es ideal para cuando queremos interrumpir un movimiento y que el servomotor parta ya de la velocidad en la que estaba, para hacer movimientos encadenados complejos... o para generar curvas diferentes a los movimientos anteriores.
param2 (opcional): aceleración inicial. Si no se especifica es el que tuviera al empezar el movimiento. Rango: -2.147.483.646, +2.147.483.647
param3: velocidad final. Rango: -2.147.483.646, +2.147.483.647
param4 (opicional): aceleración final. Si no se especifica, es cero. Rango: -2.147.483.646, +2.147.483.647
param5: tiempo total de movimiento. Rango: 0, +2.147.483.647
Ejemplo:
| S3MCH65535:1000; | El servomotor 3 alcanzará la velocidad de una vuelta por segundo en 1000ms. La velocidad y aceleración inicial del movimiento será la que esté justo al empezar la curva. Además presupone que la velocidad final que queremos será cero |
|---|---|
| S7MCH65535:-32767:1500; | El servomotor 7 alcanzará la velocidad de menos media vuelta por segundo en 1500ms. La velocidad inicial es de una vuelta por segundo, la aceleración inicial será la que esté justo al empezar la curva y la final se presupone que es cero |
| S16MCH0:10:131070:-300:4000; | El servomotor 16 alcanzará la velocidad de dos vueltas por segundo en 4000ms. La velocidad inicial es de cero con una aceleración inicial de 10 y final de -300 |
Movimiento PWM [MP]
- S12MP500[:1000];
Para controlar directamente el PWM del motor, utilizamos el comando MP.
param2 (optional): Tiempo que durará el comando. Si no introducimos tiempo el comando acabará al momento pero dejará el motor con el PWM que hayamos introducido. Si introducimos tiempo, al acabar éste, el motor se parará.
Ejemplo:
| S12MP-500; | El servomotor 12 pondrá un PWM de 500 con dirección negativa |
|---|---|
| S10MP300:1000; | El servomotor 10 pondrá un PWM de 300 durante 1000ms |
Motor Libre [MF]
- S12MF;
El comando MF deshabilita el motor. Lo que hace es apagar el puente en H. En cuanto llegue otro comando de movimiento, el puente en H se habilita de manera automática.
Ejemplo:
| S14MF; | El servomotor 14 deshabilita el motor |
|---|
Espera Motor [MW]
- S12MW250;
El comando MW funciona como un Delay. Introduce una espera. Es útil para cuando queramos mandar de un mismo comando varias tareas que queremos que se hagan separadas en el tiempo y no una detrás de otra.
Ejemplo:
| S17MW500; | El servomotor 17 espera 500ms |
|---|
Encuentra Dirección [FD]
- S1FD;
El comando FD es uno de los primeros comandos a introducir la primera vez que enciendas LibreServo. FD busca la polaridad que tiene el motor, saber si ante un voltaje dado el servomotor gira en una u otra dirección. Este comando debe realizarse con el servomotor libre de giro y sin carga alguna.
Ejemplo:
| S1FD; | El servomotor 1 busca la polaridad del motor |
|---|
Comandos de luz y sonido
LED RGB [L]
- S12L150:25:210;
El comando L controla el color e intensidad del LED RGB que trae incorporado LibreServo. Teóricamente podría mostrar cualquier color que queramos.
param2: Intensidad color verde. Rango: 0, +255
param3: Intensidad color azul. Rango: 0, +255
Ejemplo:
| S7L150:25:210; | El LED del servomotor 7 toma un color lila |
|---|
LED Arcoíris [LR]
- S12LR;
El comando LR indica al LED que empiece a rotar por los colores de manera automática.
Ejemplo:
| S9LR; | El LED del servomotor 9 empiza a rotar en colores e intensidades de manera automática |
|---|
Tono [T]
- S12T2093:200:50;
El comando T intenta generar un tono valiéndose del propio motor del servomotor. ¡No hace falta ningún altavoz para generar tu música preferida! Se recomienda utilizar frecuencias altas, por encima de 1500Hz, para que funcione mejor, octava sexta o séptima en adelante dependiendo de cada servomotor. En frecuencias bajas puede que no suene y en vez de ello vibre todo el servomotor.
param2: Duración de la nota en milisegundos. Rango: 0, +2.147.483.647
param3: Amplitud de la nota, su volumen. Rango: 0, +100
Ejemplo:
| S12T3136:200:50; | El servomotor 12 genera un tono de SOL6 durange 200ms con una amplitud del 50% |
|---|
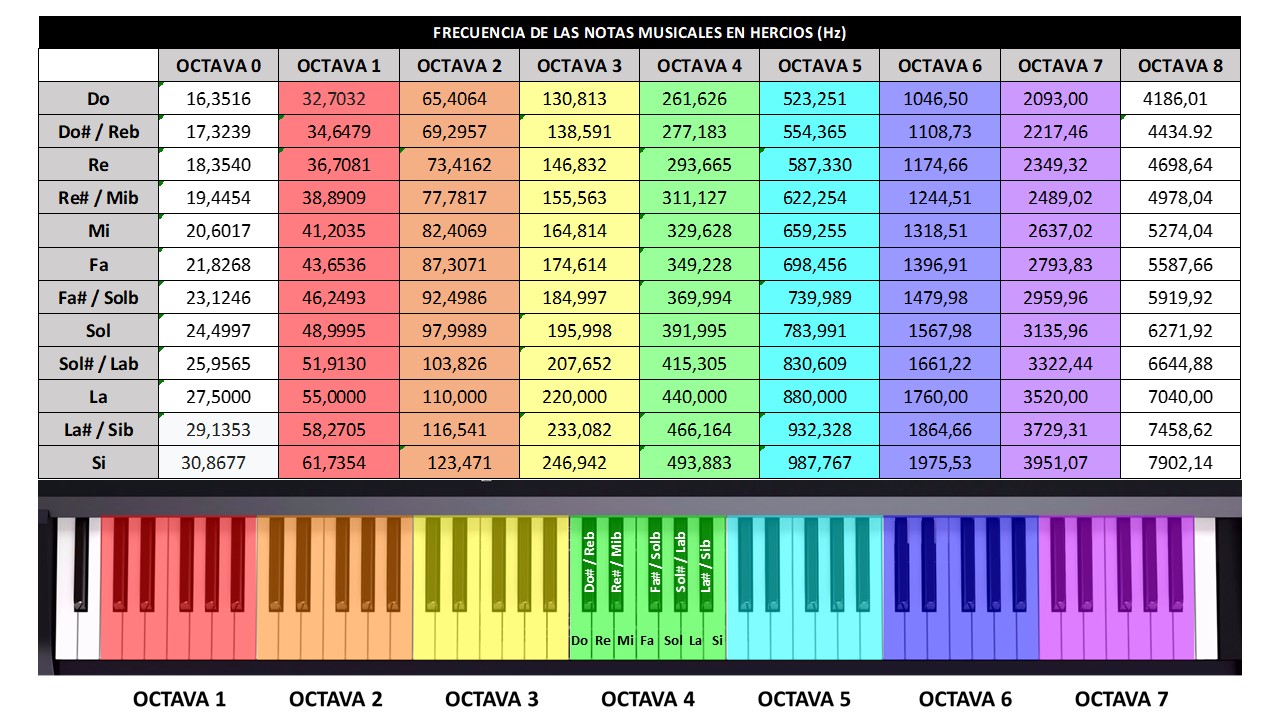 Frecuencia notas musicales @ciudadpentagrama
Frecuencia notas musicales @ciudadpentagrama
Comandos de lectura de variables
Los comandos de lectura de variables se ejecutan desde un administrador de tareas independiente. Dentro de las variables a recuperar, existen variables RAM que son sólo de lectura y que no se guardan tras apagar LibreServo y existen variables FLASH, que son de lectura y escritura y que se pueden modificar y/o guardar para que en el siguiente arranque de LibreServo mantenga el valor que nosotros le hemos dado.
Las variables son:
| ID | Nombre | R/W | Definición | Valor por defecto |
|---|---|---|---|---|
| 0 | Temp_interna | R | Temperatura en grados (x10) medida internamente en el microcontrolador | |
| 1 | Temp_externa | R | Temperatura en grados (x10) medida externamente en el sensor de temperatura NTC | |
| 2 | Temp_interna_raw | R | Lectura directa (12 bits) del sensor de temperatura interno al microcontrolador | |
| 3 | Temp_interna_kalman | R | Lectura del sensor de temperatura interno al microcontrolador tras filtro Kalman | |
| 4 | Temp_externa_raw | R | Lectura directa (12 bits) del sensor de temperatura externo NTC | |
| 5 | Temp_externa_kalman | R | Lectura del sensor de temperatura externo NTC tras filtro Kalman | |
| 6 | Voltage | R | Voltage, tensión de alimentación de LibreServo (x100) | |
| 7 | Voltage_raw | R | Lectura (12 bits) de la tensión de alimentación | |
| 8 | Voltage_kalman | R | Lectura de la tensión de alimentación tras filtro Kalman | |
| 9 | Corriente | R | Corriente consumida por el servomotor en mA | |
| 10 | Corriente_raw | R | Lectura (12 bits) de la corriente consumida por el servomotor | |
| 11 | Corriente_kalman | R | Lectura de la corriente tras filtro Kalman | |
| 12 | Encoder_raw | R | Lectura posición encoder (16 bits) | |
| 13 | Encoder_kalman | R | Lectura posición encoder tras filtro Kalman | |
| 14 | Velocidad_enc | R | Velocidad del servomotor calculada con la posición del encóder | |
| 15 | Aceleracion_enc | R | Aceleración del servomotor calculada con la posición del encóder | |
| 16 | Velocidad_sim | R | Velocidad del servomotor calculada con la posición que queremos del servomotor | |
| 17 | Aceleracion_sim | R | Aceleración del servomotor calculada con la posición que queremos del servomotor | |
| 18 | Posicion_objetivo | R | Posición que LibreServo está marcando | |
| 19 | Error | R | Diferencia entrePosición objetivo y la lectura del encóder tras filtro Kalman (Encoder_kalman) | |
| 20 | DError | R | Error diferencial (PID) | |
| 21 | PDTerm | R | Término PD del PID | |
| 22 | Iterm | R | Término Integral del PID | |
| 23 | PWM | R | PWM del motor | |
| 24 | PWM_pre | R | PWM deseado antes de mirar si el consumo de corriente es excesivo | |
| 99 | Version_LS | R | Versión interna de LibreServo | |
| 100 | ID Servomotor | R/W | ID del servomotor, por el que escuchará los comandos | 1 |
| 101 | q_corriente | R/W | Incertidumbre proceso corriente (x1000) (Kalman) | 1200 |
| 102 | q_temp_ext | R/W | Incertidumbre proceso temperatura NTC (x1000) (Kalman) | 1200 |
| 103 | q_temp_int | R/W | Incertidumbre proceso temperatura interna STM32 (x1000) (Kalman) | 1200 |
| 104 | q_volts | R/W | Incertidumbre proceso voltaje (x1000) (Kalman) | 1200 |
| 105 | q_encoder | R/W | Incertidumbre proceso encoder (x1000) (Kalman) | 1200 |
| 106 | varianza_corriente | R/W | Varianza corriente (x1000) (Kalman) | 1000 |
| 107 | varianza_temp_ext | R/W | Varianza temperatura NTC (x1000) (Kalman) | 2500 |
| 108 | varianza_temp_int | R/W | Varianza temperatura interna STM32 (x1000) (Kalman) | 150 |
| 109 | varianza_volts | R/W | Varianza voltaje (x1000) (Kalman) | 150 |
| 110 | varianza_encoder | R/W | Varianza encoder (x1000) (Kalman) | 5000 |
| 111 | vel_serie | R/W | Velocidad puerto Serie | 115200 |
| 112 | corte_temp_ext | R/W | Temperatura en grados (x10) en el NTC que para el motor | 800 |
| 113 | corte_temp_int | R/W | Temperatura en grados (x10) interna del STM32 que para el motor | 800 |
| 114 | corte_volts_alto | R/W | Voltaje (x100) que si supera para el motor | 1600 |
| 115 | corte_volts_bajo | R/W | Voltaje (x100) que si no supera para el motor | 450 |
| 116 | corte_corriente | R/W | Máxima corriente en mA. Control de torque/par | 7000 |
| 117 | uso_crc | R/W | Uso CRC (0=False, 1=True, 2=Both) | 2 |
| 118 | CRC_START_CCITT | R/W | CRC valor inicial | 0x1D0F |
| 119 | CRC_POLY_CCITT | R/W | CRC polinomio | 0x1021 |
| 120 | K_P_LS | R/W | Constante P PID modo servomotor | 200 |
| 121 | K_D_LS | R/W | Constante D PID modo servomotor | 1000 |
| 122 | K_I_LS | R/W | Constante I PID modo servomotor | 170 |
| 123 | K_P_M | R/W | Constante P PID modo motor | 200 |
| 124 | K_D_M | R/W | Constante D PID modo motor | 1000 |
| 125 | K_I_M | R/W | Constante I PID modo motor | 170 |
| 126 | offset_corriente | R/W | Compensación corriente (x1000) (0-222 -> -1000 - +1000) | 111 |
| 127 | offset_temp_int | R/W | Compensación temperatura interna (x10) (0-300 -> -150 - +150) | 150 |
| 128 | offset_temp_ext | R/W | Compensación temperatura NTC (x10) (0-300 -> -150 - +150) | 150 |
| 129 | envio_si_leo | R/W | Enviar datos por el puerto serie si leo otros datos por el puerto (0=False, 1=True, 2=True cancelar sólo el comando de envío actual) | 2 |
| 130 | saludo_inicial | R/W | Saludo inicial (0=False, 1=True) | 1 |
| 131 | min_posicion | R/W | Límite posición mínima (0-4294967294 -> -2147483647 - +2147483647) | 2147483647 |
| 132 | max_posicion | R/W | Límite posición máxima (0-4294967294 -> -2147483647 - +2147483647) | 2147483647 |
| 133 | limit_posicion | R/W | Utilizar límites posición (0=False, 1=True) | 0 |
| 134 | t_ramp_t | R/W | Tiempo por defecto rampa trapezoidal | 200 |
| 135 | t_ramp_s | R/W | Tiempo por defecto rampa senoidal | 200 |
| 136 | a_ramp_t | R/W | Aceleración por defecto en rampa trapezoidal | 100 |
| 137 | deadband | R/W | Deadband | 5 |
GET [G]
- S12G116;
El comando G pide a LibreServo un parámetro/variable interno que nos devolverá por el puerto Serie. El comando G como el resto de comandos GX van en un administrador de tareas separado del principal.
Ejemplo:
| S11G13; | Leer la posición del servomotor 11 |
|---|
Get Varios [GS]
- S12GS5[,7,8,100,102]:10:500;
El comando GS nos devuelve no sólo una variable, sino varias variables que querramos (hasta un máximo de 15). Además, permite programar que nos devuelva los valores cada X milisegundos.
param2: Número de veces que queremos que nos envíe el valor de las variables. Rango: 1, +2.147.483.647
param3: Cada cuántos milisegundos queremos que nos envíe el valor de las variables. Rango: 1, +2.147.483.647
Ejemplo:
| S12GS9,23:1000:1; | Leer del servomotor 12 el consumo de corriente y el PWM del motor 1000 veces con un tiempo entre lecturas de 1 milisegundo. Estará un segundo enviando datos |
|---|---|
| S5GS0,1:1,1; | Leer las temperaturas del servomotor 5. Sólo se enviarán una vez |
Get Varios con Cabecera [Gs]
- S12Gs5[,7,8,100,102]:10:500;
El comando Gs es igual que el comando GS con una diferencia, nos envía en un primer momento una línea con el nombre de todas las variables que queremos separado por comas, esto es muy útil para sacar a un fichero .csv la salida, o para ver las variables dibujadas en el Serial Plotter de Arduino. El comando Gs nos devuelve no sólo una variable, sino varias variables que querramos (hasta un máximo de 15). Además, permite programar que nos devuelva los valores cada X milisegundos.
param2: Número de veces que queremos que nos envíe el valor de las variables. Rango: 1, +2.147.483.647
param3: Cada cuántos milisegundos queremos que nos envíe el valor de las variables. Rango: 1, +2.147.483.647
Ejemplo:
| S3Gs9,23:1000:1; | Leer del servomotor 3 el consumo de corriente y el PWM del motor 1000 veces con un tiempo entre lecturas de 1 milisegundo. Estará un segundo enviando datos. Envía una línea inicial de cabecera |
|---|---|
| S9Gs0,1:1,1; | Leer las temperaturas del servomotor 9. Sólo se enviarán una vez y con cabecera |
Espera Get [GW]
- S12GW250;
El comando GW funciona como un Delay. Introduce una espera en el administrador de tareas de la lectura de variables. Es útil para cuando queramos empezar a recibir datos pero tras una espera para coincidir con algún comando de motor específico.
Ejemplo:
| S16GW500; | El servomotor 16 espera 500ms en el administrador de tareas de la lectura de variables |
|---|
Set [S]
- S12S111:9600;
Con el comando S cambiamos el valor de las variables de LibreServo que sean escribibles.
param2: Nuevo valor de la variable. Rango: -2.147.483.646, +2.147.483.647
Ejemplo:
| S1S100:10 | Cambia el ID del servomotor 1 a 10 |
|---|---|
| S10S111:9600 | Cambia la velocidad del puerto serie [variable 111] del servomotor 10, a 9600 bps |
Guardar [SV]
- S12SV;
El comando SV guarda la configuración actual de LibreServo, el valor de las variables modificables, en la Flash del microcontrolador, así la configuración no se perderá al apagar el servomotor.
Ejemplo:
| S39SV; | Guarda el valor de todas las variables modificables del servomotor 39 en Flash |
|---|
Reset variable [RV]
- S12RV116
El comando RV devuelve el valor de una variable al valor que tenga en flash. Si justo antes se ha guardado la variable con el comando SV, dicha variable tendrá en memoria el mismo valor que en flash.
Ejemplo:
| S23RV137; | Devuelve el valor en flash del servomotor 23 a la variable deadband |
|---|
Reset variable valor por defecto [Rv]
- S12Rv116
El comando Rv devuelve el valor de una variable al valor de defecto especificado en la tabla. Y guarda dicha variable en flash.
Ejemplo:
| S18Rv117; | La variable 117 (uso_crc) del servomotor 18, vuelve a su valor por defecto, 2 |
|---|
Reset Servo [RS]
- S12RS;
El comando RS devuelve el valor de todas las variables del servomotor al que tengan en flash.
Ejemplo:
| S10RS; | El servomotor 10 devuelve el valor que tenga en flash a todas sus variables |
|---|
Reset Servo por defecto [Rs]
- S12Rs
El comando Rs cambia el valor de todas las variables a su valor por defecto y lo guarda en flash.
Ejemplo:
| S45Rs; | El servomotor 45 devuelve el valor de todas sus variables a su valor por defecto y las guarda en flash |
|---|